Research Areas
My research advances human-centered design for complex sociotechnical systems, with particular emphasis on human spaceflight. Through a combination of controlled experimentation, analog mission studies, and mathematical modeling, I develop design principles and software tools that help crews operate safely and independently.
I build crew interfaces for simulation-based training research, and I prototype and deploy production-quality systems that directly support spaceflight operations.
Crew Autonomy and Self-Scheduling
As NASA plans missions to the Moon and Mars, communication delays of up to 22 minutes each way will fundamentally change how crews operate. Real-time support from Mission Control becomes impossible, requiring astronauts to independently manage complex operational timelines and respond to dynamic situations without ground assistance.
My research addresses this challenge by developing and evaluating self-scheduling tools. These tools let crews plan and revise their activities without Mission Control. The central question is: How do we design tools that let non-experts manage complex timelines and respond to change?
Through analog mission studies in NASA's Human Exploration Research Analog (HERA) and aboard the International Space Station (ISS), I've validated scheduling interfaces and identified usability factors that support crew autonomy. I also contribute to the ongoing development of Playbook, NASA's planning software used in analog missions, including HERA and the crew health and performance exploration analog (CHAPEA), and in lunar payload deliveries through the commercial lunar payload services (CLPS) program. This work directly informs the design of software systems for Artemis missions and beyond.
Recent Publications:

Human-Automation and Robotic Interaction
Successful deep-space missions will depend on effective collaboration between astronauts, intelligent automation, and robotic systems. My research in this area helps mission planners assess the risks and opportunities of new automation and robotic technologies.
I develop trade-space analysis methods that use human performance modeling to quantify how crew size, automation capabilities, and mission parameters interact. This work revealed that a crew of four, the baseline for Mars missions, may lack sufficient expertise to handle unforeseen failures across critical systems. It also found that workload equivalent to current ISS missions would require larger crews in deep space.
Beyond trade studies, this research has produced design guidelines for human-automation interaction in space operations. These guidelines focus on appropriate trust, supervisory control across communication delays, and clear situational awareness when automation manages complex tasks. I've also built detailed simulations to support human-in-the-loop research campaigns and quantitative analysis of operator performance under varying configurations.
Recent Publications:

Augmented Feedback and Performance Modeling
My doctoral research examined whether automated feedback can speed skill acquisition and retention in complex manual control tasks. The central question was: Can automated systems match expert human instructors?
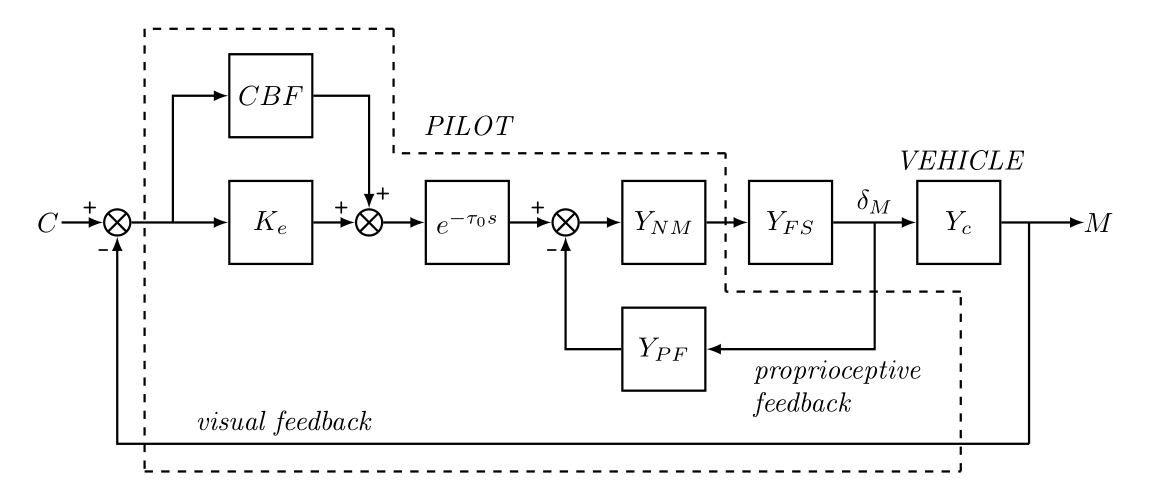
I demonstrated that concurrent bandwidth feedback, a real-time automated guidance that activates only when operators exceed error thresholds, significantly improves performance and reduces training time without increasing cognitive workload. The approach mirrors how expert instructors intervene only when needed, giving operators enough support to learn without creating dependency.
I also extended the Structural Model of the human pilot, a mathematical framework used since the 1960s, to represent and predict the effects of concurrent bandwidth feedback. The model helps optimize feedback parameters and predict training results. I've implemented and validated these models through custom-built simulation environments that support real-time performance assessment.
Recent Publications: